by Saumil Shah @therealsaumil
October 2021
The EMUX Docker image contains updated tools and scripts to make
debugging emulated IoT processes easy. No more fiddling around with
gdbserver and GDB's target remote,
set sysroot commands! One command to debug them all.
The EMUX Firmware Emulation Framework contains essential tools and
utilities to statically and dynamically analyse emulated IoT targets.
Here, we shall see how to use gdb to debug a process
running on an emulated IoT target. We shall use the EMUX Docker
image and debug the web server running on the Trivision
NC-227-WF IP Camera as an example.
./run-emux-docker
Click the EMUX Launcher icon on the top toolbar and select the Trivision NC-227-WF IP Camera:

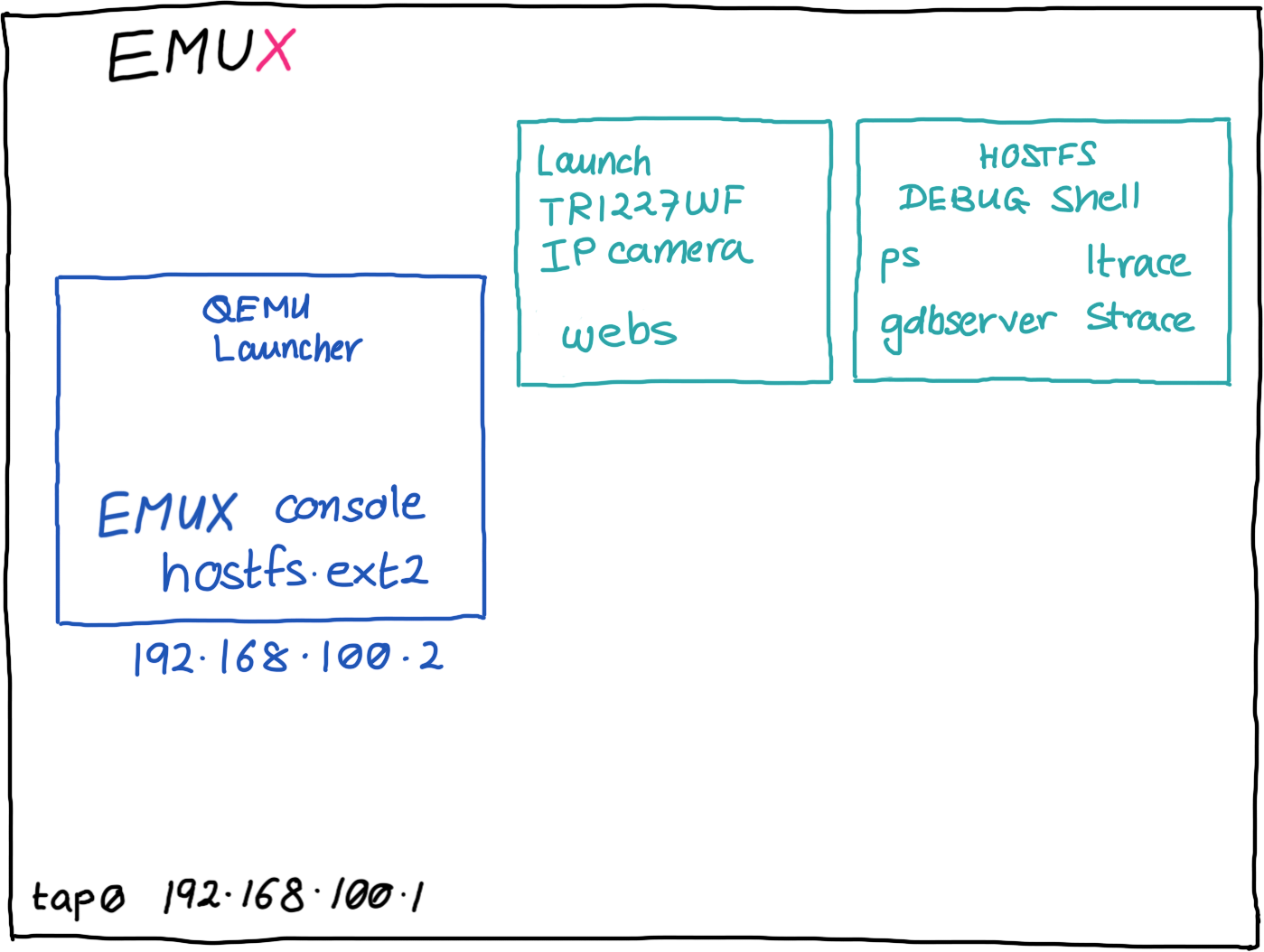
The EMUX launcher invokes QEMU and boots the kernel registered with
the IP Camera, mounts hostfs-arm.ext2 and shows the EMUX
console.

Attach to a new shell in the EMUX Docker container by invoking
./emux-docker-shell. Once you are in the shell, run the
userspace command to access the userspace menu:
./emux-docker-shell
[emux-docker 🐚] ~$ userspaceSelect the option Start Trivision NC-227-WF IP Camera.

The IP Camera's init scripts will now be started and
eventually all its system and application services will be running.

Attaching to a new shell and running userspace again
invoke the EMUX HOSTFS DEBUG Shell. This shell allows
you to run commands to view running processes, inspect a process'
virtual memory map, run utilities like objdump,
strace, ltrace, etc.
At this point, the emulated IP Camera is ready to be analysed.
The /emux/run directory contains a few scripts to enable
easy enumeration of the device's processes and also attach a debugger to
a device process. /emux/run is present in the
$PATH on the EMUX Docker container.
Attach to a new docker shell using ./emux-docker-shell
and run emuxps:
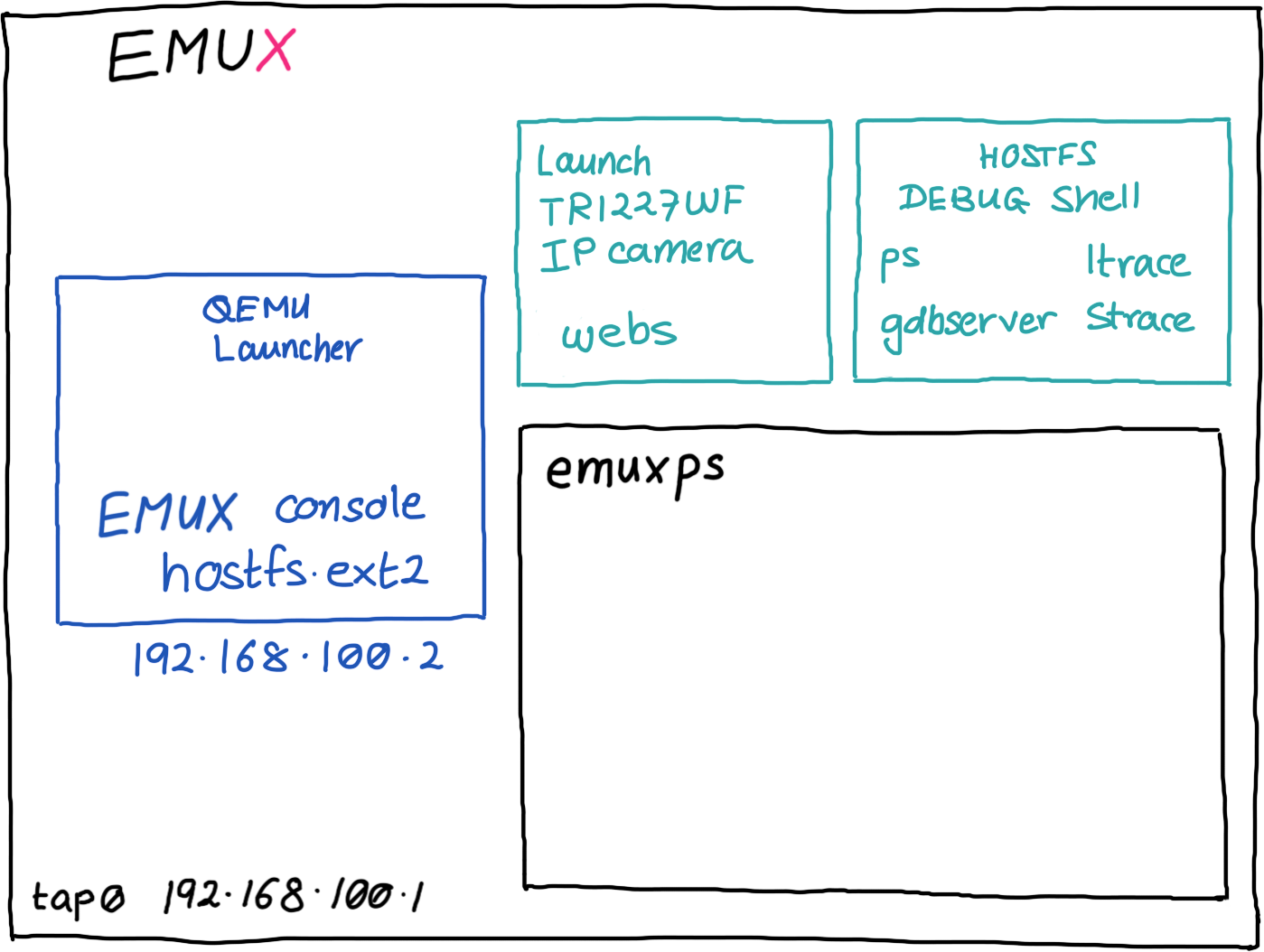
emux~$ emuxps
PID TTY STAT TIME COMMAND
1 ? Ss 0:00 init
2 ? S< 0:00 [kthreadd]
3 ? S< 0:00 [ksoftirqd/0]
4 ? S< 0:00 [watchdog/0]
5 ? S< 0:00 [events/0]
6 ? S< 0:00 [khelper]
9 ? S< 0:00 [async/mgr]
105 ? S< 0:00 [kblockd/0]
112 ? S< 0:00 [kseriod]
118 ? S< 0:00 [kmmcd]
143 ? S 0:00 [khungtaskd]
144 ? S 0:00 [pdflush]
145 ? S 0:00 [pdflush]
146 ? S< 0:00 [kswapd0]
147 ? S< 0:00 [aio/0]
148 ? S< 0:00 [nfsiod]
300 ? S< 0:00 [scsi_eh_0]
324 ? S< 0:00 [mtdblockd]
332 ? S< 0:00 [kpsmoused]
367 ? S< 0:00 [rpciod/0]
385 ? Ss 0:00 /sbin/syslogd -m 0
387 ? Ss 0:00 /sbin/klogd
409 ? Ss 0:00 /usr/sbin/dropbear
413 ttyAMA0 Ss+ 0:00 /sbin/agetty -p -L ttyAMA0 115200 vt100
414 ? Ss 0:01 /usr/sbin/dropbear
415 pts/0 Ss 0:00 -sh
430 pts/0 S 0:00 /bin/bash ./run-init
441 pts/0 S 0:00 /bin/sh /etc/emuxinit
465 ? Ss 0:00 syslogd
467 ? Ss 0:00 klogd
480 pts/0 S 0:00 nvctl
482 pts/0 S 0:00 inetd_tcp
493 pts/0 S 0:00 netmgr
498 pts/0 S 0:00 storage
501 pts/0 S 0:00 nvrd
507 pts/0 S 0:00 httpclient -c /var/config/httpclient_task15.conf
510 pts/0 S 0:00 taskmgr
511 pts/0 S+ 0:00 /bin/sh
538 pts/0 S 0:00 ndcpd
540 pts/0 S 0:00 ndcpd2
542 pts/0 S 0:00 ndcpd3
547 pts/0 S 0:00 upnpd eth0
550 pts/0 S 0:00 upnpd eth0
551 pts/0 S 0:00 upnpd eth0
552 pts/0 S 0:00 upnpd eth0
554 pts/0 S 0:00 upnpd eth0
556 pts/0 S 0:00 webs
557 pts/0 S 0:00 upnpd eth0
559 pts/0 S 0:00 upnpd eth0
560 pts/0 S 0:00 upnpd eth0
562 pts/0 S 0:00 onvifn
564 pts/0 S 0:00 onvifd
567 pts/0 S 0:00 ipcamd
569 pts/0 S 0:00 ipcamd
571 pts/0 S 0:00 ipcamd
572 ? Ss 0:01 /usr/sbin/dropbear
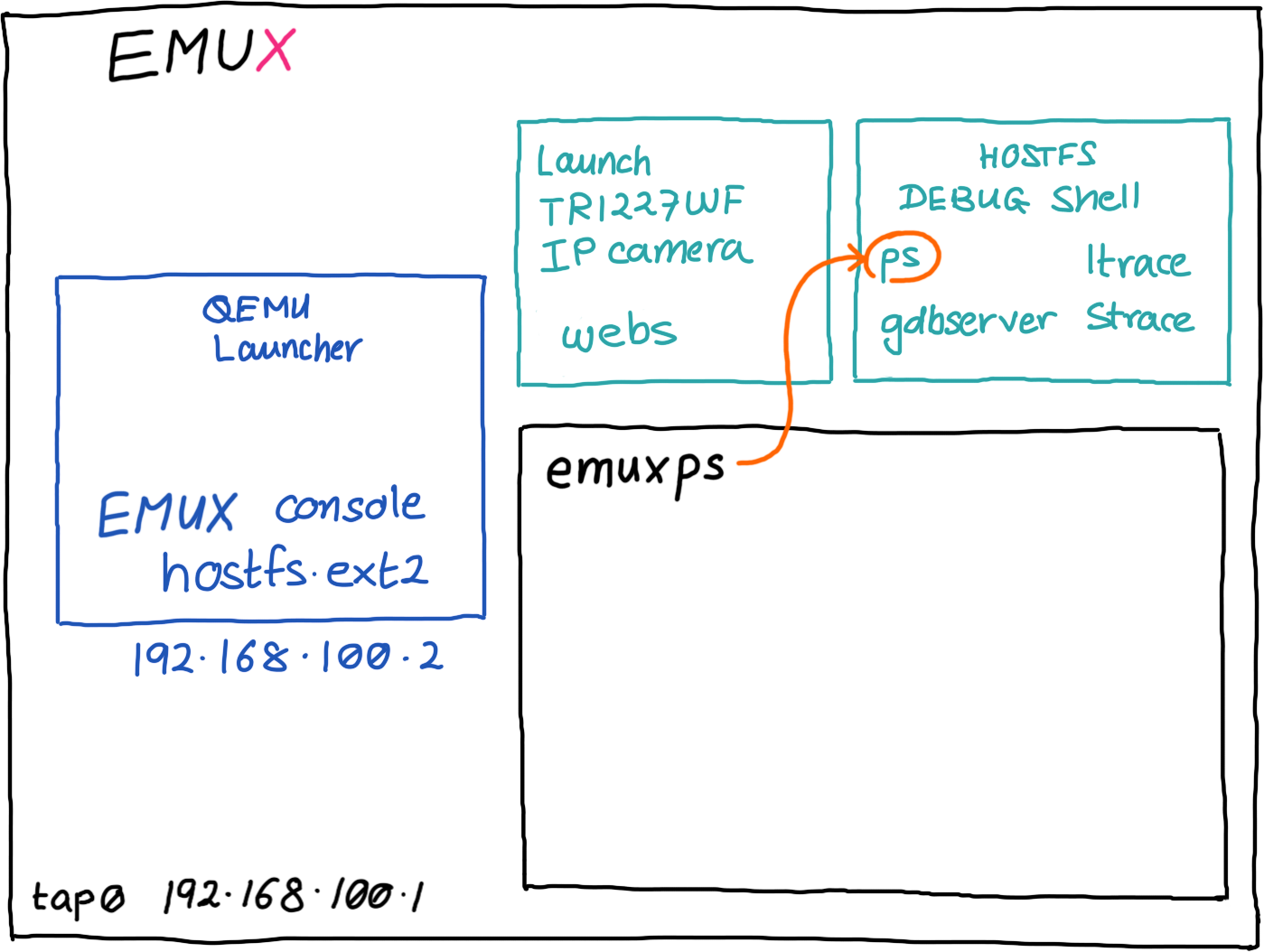
575 ? R 0:00 ps axInternally, emuxps invokes ssh and runs a
process enumeration command on the emulated device accessible at
192.168.100.2. You can perform the same task by invoking
the EMUX HOSTFS Debug Shell and running the ps command
within it, however emuxps makes the task easier.
We will now invoke gdb and attach it to the
webs process running in QEMU. We need a cross platform GDB
that runs on an x86 host and is capable of debugging ARM targets. The
EMUX Docker container has gdb-multiarch installed in
it.
The typical process would involve invoking the EMUX HOSTFS Debug
Shell, running gdbserver :5000 --attach $(pidof webs) and
then invoking gdb-multiarch and connecting to the remot
target using:
target remote 192.168.100.2:5000
set sysroot target:/emux/TRI227WF/rootfsThe set sysroot command is important for GDB to find the
proper binaries for symbol resolution, since the IP Camera's binaries
are running inside a chroot jail.
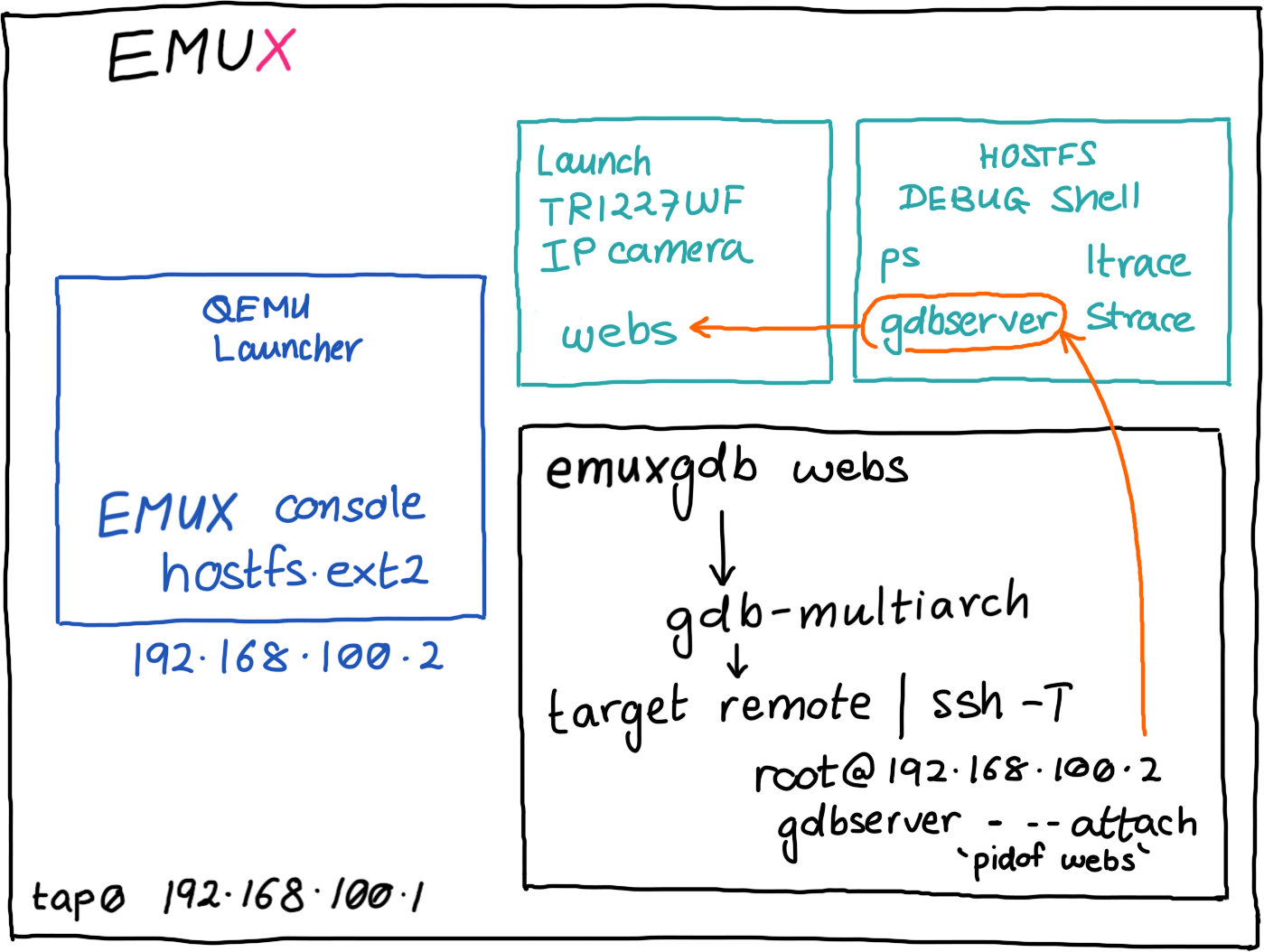
However, all this is made easy using /emux/run/emuxgdb.
emuxgdb launches gdb-multiarch, and internally
invokes ssh to launch gdbserver on
192.168.100.2. The remote debugging is enabled using STDIN
to the SSH connection!
emux:~$ emuxgdb webs
Remote debugging using | ssh -T root@192.168.100.2 gdbserver - --attach \`pidof webs\`
Attached; pid = 556
Remote debugging using stdio
Reading /emux/TRI227WF/rootfs/usr/bin/webs from remote target...
warning: File transfers from remote targets can be slow. Use "set sysroot" to access files locally instead.
Reading /emux/TRI227WF/rootfs/usr/bin/webs from remote target...
Reading symbols from target:/emux/TRI227WF/rootfs/usr/bin/webs...(no debugging symbols found)...done.
Reading /lib/libgcc_s.so.1 from remote target...
warning: .dynamic section for "target:/lib/libgcc_s.so.1" is not at the expected address (wrong library or version mismatch?)
Reading /lib/libc.so.0 from remote target...
warning: .dynamic section for "target:/lib/libc.so.0" is not at the expected address (wrong library or version mismatch?)
Reading /lib/ld-linux.so.3 from remote target...
Error while mapping shared library sections:
Could not open `target:/lib/ld-linux.so.3' as an executable file: No such file or directory
Reading symbols from target:/lib/libgcc_s.so.1...(no debugging symbols found)...done.
Reading symbols from target:/lib/libc.so.0...(no debugging symbols found)...done.
Reading /lib/ld-linux.so.3 from remote target...
warning: Unable to find dynamic linker breakpoint function.
GDB will be unable to debug shared library initializers
and track explicitly loaded dynamic code.
0x4002f8c4 in ?? () from target:/lib/libc.so.0
Reading /emux/TRI227WF/rootfs/lib/libgcc_s.so.1 from remote target...
Reading /emux/TRI227WF/rootfs/lib/libgcc_s.so.1 from remote target...
Reading symbols from target:/emux/TRI227WF/rootfs/lib/libgcc_s.so.1...done.
Reading /emux/TRI227WF/rootfs/lib/libc.so.0 from remote target...
Reading /emux/TRI227WF/rootfs/lib/libc.so.0 from remote target...
Reading symbols from target:/emux/TRI227WF/rootfs/lib/libc.so.0...done.
Reading /emux/TRI227WF/rootfs/lib/ld-linux.so.3 from remote target...
Reading /emux/TRI227WF/rootfs/lib/ld-linux.so.3 from remote target...
Reading symbols from target:/emux/TRI227WF/rootfs/lib/ld-linux.so.3...(no debugging symbols found)...done.
Reading /emux/TRI227WF/rootfs/lib/ld-linux.so.3 from remote target...
(gdb)Now, you can go about debugging webs as you wish.
(gdb) info registers
r0 0xfffffdfe 4294966782
r1 0x40083c88 1074281608
r2 0x40083ca0 1074281632
r3 0x40083cb8 1074281656
r4 0xbefffa68 3204446824
r5 0x1 1
r6 0x40083ca0 1074281632
r7 0x8e 142
r8 0x40083cb8 1074281656
r9 0x4007a7a0 1074243488
r10 0x0 0
r11 0x4 4
r12 0x61068 397416
sp 0xbefffa38 0xbefffa38
lr 0x43cf0 277744
pc 0x4002f8c4 0x4002f8c4 <select+16>
cpsr 0x60000010 1610612752(gdb) info proc mappings
process 556
Mapped address spaces:
Start Addr End Addr Size Offset objfile
0x8000 0x59000 0x51000 0x0 /emux/TRI227WF/rootfs/usr/bin/webs
0x60000 0x61000 0x1000 0x50000 /emux/TRI227WF/rootfs/usr/bin/webs
0x61000 0x65000 0x4000 0x51000 /emux/TRI227WF/rootfs/usr/bin/webs
0x65000 0x78000 0x13000 0x0 [heap]
0x40000000 0x40005000 0x5000 0x0 /emux/TRI227WF/rootfs/lib/ld-uClibc-0.9.30.2.so
0x40005000 0x40006000 0x1000 0x0
0x4000c000 0x4000d000 0x1000 0x4000 /emux/TRI227WF/rootfs/lib/ld-uClibc-0.9.30.2.so
0x4000d000 0x4000e000 0x1000 0x5000 /emux/TRI227WF/rootfs/lib/ld-uClibc-0.9.30.2.so
0x4000e000 0x40018000 0xa000 0x0 /emux/TRI227WF/rootfs/lib/libgcc_s.so.1
0x40018000 0x4001f000 0x7000 0x0
0x4001f000 0x40020000 0x1000 0x9000 /emux/TRI227WF/rootfs/lib/libgcc_s.so.1
0x40020000 0x40021000 0x1000 0xa000 /emux/TRI227WF/rootfs/lib/libgcc_s.so.1
0x40021000 0x4006b000 0x4a000 0x0 /emux/TRI227WF/rootfs/lib/libuClibc-0.9.30.2.so
0x4006b000 0x40072000 0x7000 0x0
0x40072000 0x40073000 0x1000 0x49000 /emux/TRI227WF/rootfs/lib/libuClibc-0.9.30.2.so
0x40073000 0x40074000 0x1000 0x4a000 /emux/TRI227WF/rootfs/lib/libuClibc-0.9.30.2.so
0x40074000 0x400f9000 0x85000 0x0
0xbefeb000 0xbf000000 0x15000 0x0 [stack]EMUX Home Page: https://emux.exploitlab.net/